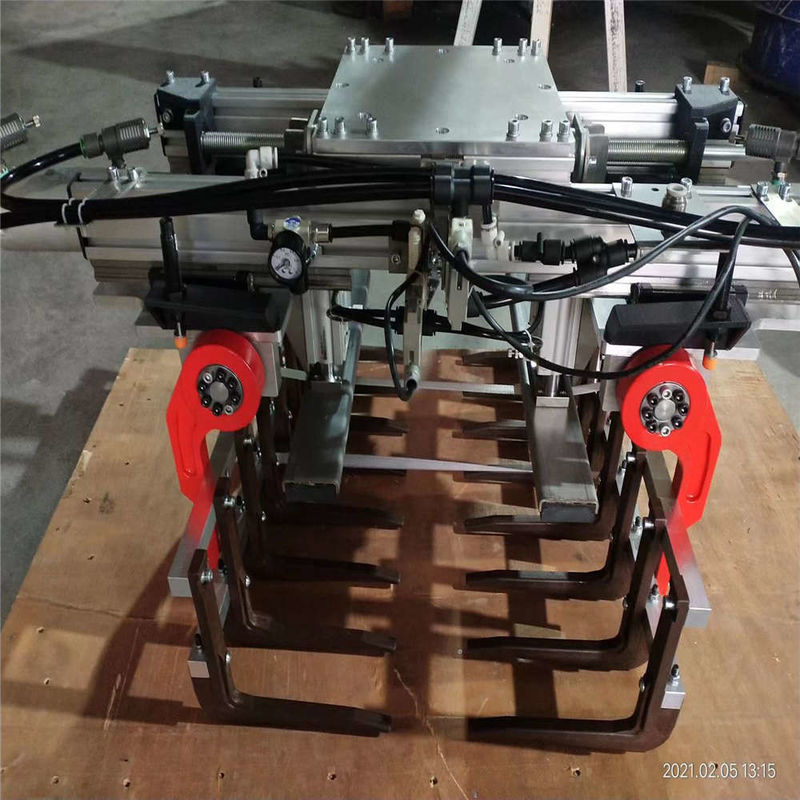
래프터 다른 패러피어 장비
입력 요구 데이터 참조
| 1 표 1 |
| 잡기 타입 |
가방 |
| 무게와 크기를 파악 |
50kg:L1050mm*W550mm*H250mm |
| 팔레티화 속도 (백/시간) |
450백/시간 |
| 팔레트 포맷 |
1번 잡고 1번 방출 |
| 잡기 형태 |
치아잡기 |
| 주요 재료 |
알루미늄 합금 및 탄소 강철 |
| 주요 공기 부품 |
SMC |
| 치아 재료 |
둥근 바 |
| 잡기 치아 간격 |
80mm |
| 그립어 크기 (반응 값) |
L1057mm*W908mm*H470mm |
| 그리퍼 무게 (KG) |
40kg |
| 로봇 브랜드 |
EFORT |
| 로봇 부하 (KG) |
ER130-4-2800 |
| |
|
| 2 표 2 |
| 잡기 타입 |
카튼 상자 |
| 무게와 크기를 파악 |
15kg:L300mm*W200mm*H200mm |
| 팔레티화 속도 (백/시간) |
450 상자/시간 |
| 팔레트 포맷 |
1번 잡고 1번 방출 |
| 잡기 형태 |
접시 접착기 |
| 주요 재료 |
알루미늄 합금 및 탄소 강철 |
| 주요 공기 부품 |
SMC |
| 그립어 크기 (반응 값) |
L800mm*W180mm*H400mm |
| 그리퍼 무게 (KG) |
40kg |
| 로봇 브랜드 |
EFORT |
| 로봇 부하 (KG) |
ER180-4-3200 |
| |
|
참고: 복합 접착기를 만들고 진공 세트를 추가하는 것이 좋습니다.
상자와 상자 사이를 고려해야 합니다. 상자와 상자 사이를 튀어나온 접착판의 두께가
팔레트 상자에 상자가 예약되어 있기 때문에 각 상자 계층과
상자 간격은 동일합니다. 그래서 스플린트 형태로 잡기용으로만 만들어집니다.
또한 기계가 걷는 동안 안전 보호 기능을 제공하지 않으며
상자를 던져. 그것은 복합 유형으로 만들어지면, 그것은 단지 흡수 컵을 확장하고 상자를 빨아 넣는 것이 필요합니다.
상자가 특정 높이까지 빨아들여, 흡수 컵이 들어갑니다, 그리고 그 다음 스플린트는 상자에 고정됩니다. 상자를 배치 할 때,
먼저 스플린트를 열고 흡입컵을 확장하고 상자를 트레이에 놓습니다. 복합 손잡이는 약 65KG,
가격은 상하이 FOB 7000 달러입니다. |
사용 설명서:
사용 설명서
1관련 설치 및 디버깅 직원은 포장하고 해체 요청해야합니다
2설치 단계는 다음과 같습니다.
1) 기계의 프로그래밍 방향에 따라 기계에 손잡이를 설치
2) 다음 기계에 손잡이를 설치하고 단단히 고정
3) 필요에 따라 호흡기와 회로를 연결
4) 설치가 완료 된 후, 스티커는 작동 후 교육 상자와 함께 활성화되어야합니다. (행동이 올바르게 디버깅되기 전에 기계와 연결되지 않아야합니다.그렇지 않으면 그 결과는 당신 자신의 위험에 있습니다..) 손잡이는 아무 이유 없이 열고 닫아서는 안 됩니다.
5) 교육 상자의 교육이 완료되면 연결 테스트를 수행하고 마침내 정상적인 작동에 들어갈 수 있습니다.
6) 당신이 손잡이의 너비를 조정하려면, 당신은 먼저 관련 나사 또는 견과류를 풀고, 그 다음 손잡이의 너비를 조정하는 나사 회전해야합니다
7) 먹이물질의 형태는 먹이물질에 똑바로 유지되어야 합니다. 그렇지 않으면, 잡기기가 잡아야 할 물체에 부딪히고, 심각한 경우 호스트가 손상될 수 있습니다.
시공 절차
码?? 抓手调试 단계
팔레티제어 립퍼 디버깅 단계
1.抓手在安装于机器人臂后,找准在待码机的中心位置,然后找准零点位置 ((不宜过深).抓手가 로봇 팔에 설치된 후, 대기 기계의 중앙 위치를 위치하고, 그 다음 제로 위치를 (너무 깊지 않은) 위치하십시오.
2. 零点位置를 찾은 후,零位에서 수동 방식으로 抓 打开,查看 抓 打开过程中是否碰到周边东西的现象.做适当调整.直到安全打开和关闭.零位置을 찾은 후, manually open the gripping teeth at the zero position,그리고 열기 과정 중에 포착 치아 주변 물체를 만지는지 확인적절한 조정을 해야 합니다. 열고 닫을 수 있을 때까지.
3포착기를 정지하고 전단반의 ′′판을 조정해서 포착기의 중심과 포착기의 중심이 일치해야 합니다.제로 위치에서 gripper를 중지 하 고 컨베이어에 있는 덩어리의 중심이 컨베이어에 있는 덩어리의 중심과 일치 해야 하기 위해 앞 컨베이어의 바벨을 조정.
4.严格查看实际包子输送进等码机后的位置.保证与第三条的结果一致,锁定所有??板的螺丝.保持不能轻易变化. 엄격하게 그들이 대기 기계로 운송 된 후 실제 덩어리의 위치를 확인. 항목과 같은 결과를 보장하기 위해 3,바늘의 모든 나사를 잠그고쉽게 바꿀 수 없습니다.
5.按3,4条调整完后,用校示盒 手动校准各位 위치 3 및 4 항목에 따라 조정 후, 각 위치를 수동으로 캘리브레이션 상자를 사용
6. in实抓包子 전 확인包子의 모든 크기,符合 계약 요구 후 사용 수동 형태 시도抓包子,抓起包子 후 확인抓手是否抓实包子.根据实际情况对抓手宽度进行适当调整.손으로 빵을 잡으려 해덩어리 들 을 뜯어 고른 후, 잡기 가 덩어리 들 을 잡았는지 확인 한다. 실제 상황 에 따라 잡기 의 너비 를 적절 히 조정 한다.
7. 위의 단계를 완료하면, 10%의 속도와 공중에서 전체 팩을 실행하고, 20%의 속도로 진입한 후 실착을 확인하고, 적절한 속도까지 점차적으로 속도를 높입니다. 위의 단계를 완료한 후, 전체 팔레트를 위해 10%의 속도로 정지 상태로, 그것이 올바르는지 확인한 후,20% 속도에서 실제 잡힘을 입력, 그리고 그 다음에는 적절한 속도로 도달 할 때까지 점차적으로 속도를 증가합니다.
8. 마지막으로 확인 기구 및 제어 가이드가 잘 고정되어 있는지. 기구 및 제어 가이드가 작동 중 손상되는 것을 피하십시오. 마지막으로 호흡기 및 제어 가이드가 손잡이에 잘 고정되어 있는지 확인하십시오. 작동 중에 호흡기 및 제어 가이드가 떨어지는 것을 피하십시오.
9.检查是否安装防突然断气装置.以上各步完成到位,可以正常工作.Anti-sudden gas cut-off device is installed. 위의 단계가 완료되어 정상적으로 작동 할 수 있는지 확인하십시오.
기준상황
포장 정보

사용자 정의 요구 사항은 매우 환영합니다

 귀하의 메시지는 20-3,000 자 사이 여야합니다!
귀하의 메시지는 20-3,000 자 사이 여야합니다!